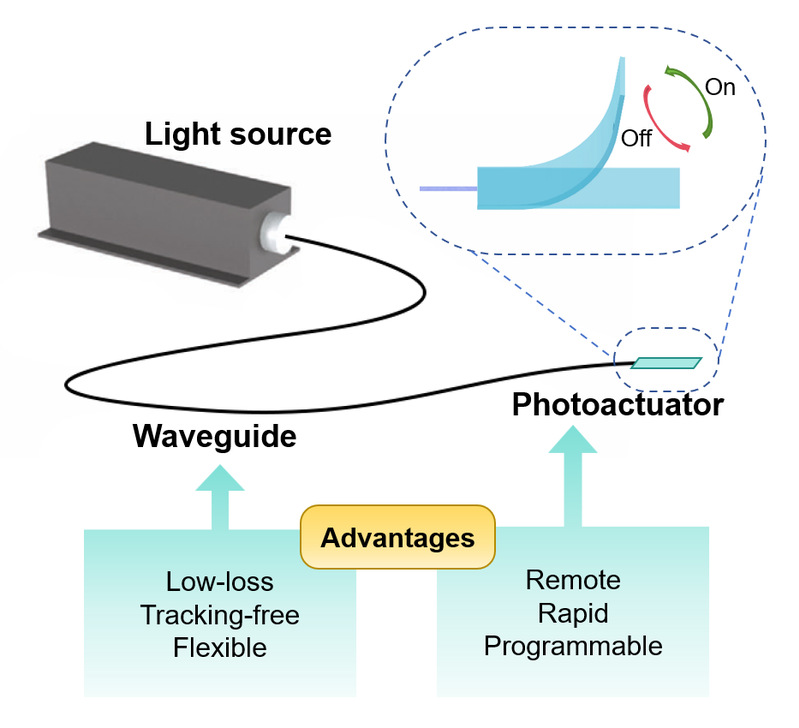
光波导致动器是一种通过光波导(如光纤或平面波导)将光能引导至光响应材料,从而将光能转化为精确机械运动的装置。相比热、电、磁、化学、湿度等驱动方式,光驱动的优势在于传输速度快、无需复杂线路,且其波长、强度和偏振的可调性提供了高精度的空间寻址能力和时序开关控制,易于实现可编程运动。目前大多数光致动器依赖自由空间照明,但这种方式存在能量转换效率低、需要主动光束追踪的局限性。将光路嵌入波导内部提供了一种解决方案:光波导通过全反射低损耗地传输光子,使能量传输与致动器自身运动及周围环境解耦。因此,光波导致动器兼顾了光照的精确性与操作的灵活性,在软体机器人、生物医学工具以及在非透明或密闭环境中工作的可重构设备中具有广阔应用前景。
对于光波导致动器领域的研究现状,我院崔继斋青年研究员课题组近日受邀在《Advanced Robotics Research》上发表了题为《Waveguide Photoactuators: Materials, Fabrication, and Applications》的综述论文。

该综述对比了光响应材料中光热、光化学和光力三种主要驱动机制,以及光波导类别中光纤和集成光学波导两种主要平台,并总结了光波导致动器的制造与集成策略,如模具铸造、光刻图案化、嵌入式铸造及后组装方法。变形机制部分重点阐述了基于应力不匹配的双层结构或不对称照明如何实现弯曲、抓取、卷曲等行为,并通过应用案例(如微创手术工具、软体机器人抓手、微流体泵等)展示了其在复杂环境中的潜力。性能分析部分评估了尺寸、变形角度、响应时间等关键指标,指出减薄厚度、提升界面耐久性和液相操作是未来改进方向。最后,文章总结当前挑战并展望未来研究,包括扩展材料兼容性、优化集成工艺以及多功能集成能力,以推动波导光致动器从实验室原型向实际应用转化。
本论文第一作者为智慧纳米机器人与纳米系统国际研究院硕士生奚珉劼,崔继斋青年研究员为论文的通讯作者。该工作得到了国家重点研发计划、国家自然科学基金、上海市科委等项目的资助和支持。
文章信息:
Minjie Xi, Hemin Pan, Yang Zong, Yongfeng Mei, Jizhai Cui*, Advanced Robotics Research, 2025, e202500148.
文章链接:
https://doi.org/10.1002/adrr.202500148
Waveguide Photoactuators: Materials, Fabrication, and Applications
Waveguide photoactuators direct light through optical fibers or planar waveguides to stimuli-responsive materials, converting optical energy into precise mechanical motion without the alignment constraints or undesired scattering of free-space illumination. Their tethered yet flexible architecture promises applications in minimally invasive surgical tools, soft robotic grippers for confined spaces, and reconfigurable elements for integrated photonic circuits. This review contrasts the major actuation pathways, namely photothermal, photochemical, and optical-force mechanisms, and identifies representative material platforms that enable them. It then surveys principal waveguide geometries and summarizes fabrication and integration approaches that join waveguides with active films while maintaining optical coupling efficiency and mechanical robustness. Deformation concepts are organized around stress-mismatch bilayers and asymmetric illumination, which provide a unified account of bending, hooking, coiling, and pumping behaviors. A comparative performance analysis highlights thickness reduction, interface durability, and liquid-phase operation as key levers for future improvement, and outlines how programmable alignment or patterned inert layers can further expand functionality. By connecting these elements into a coherent framework, the review aims to guide materials selection, device design, and system integration, accelerating the transition of waveguide photoactuators from laboratory prototypes to versatile microscale tools for complex real-world environments.