水凝胶是一类具有亲水基团的三维网络结构聚合物智能材料,在水中可以迅速溶胀并在溶胀状态可以保持大量体积的水而不溶解。由于水凝胶具有良好的生物相容性和生物系统的相似性,被广泛用于伤口敷料、隐形眼镜等日常生活以及组织工程、软机器人等前沿研究。然而,由于水凝胶富含亲水基团,在本征上表现为亲水特性,一般不疏水,因此基本不存在具有疏水特征的纯水凝胶材料。
2021年4月14日,我院梅永丰教授课题组在《科学·机器人学》(Science Robotics)上发表题为《仿生水黾的自驱动水凝胶》(“Self-powered locomotion of a hydrogel water strider”)的研究工作。博士研究生朱红为第一作者,梅永丰为通讯作者,该工作得到复旦大学高分子科学系和聚合物分子工程国家重点实验室共享仪器平台的大力支持。研究团队从“0”出发,原创性地合成了一种具有动态疏水特征的新型水凝胶智能材料。该水凝胶在水面上可自驱动运动,无需额外能量供给;饱和吸水后该活性水凝胶即停止运动,干燥处理可恢复活力,再次实现自驱动快速水面运动。
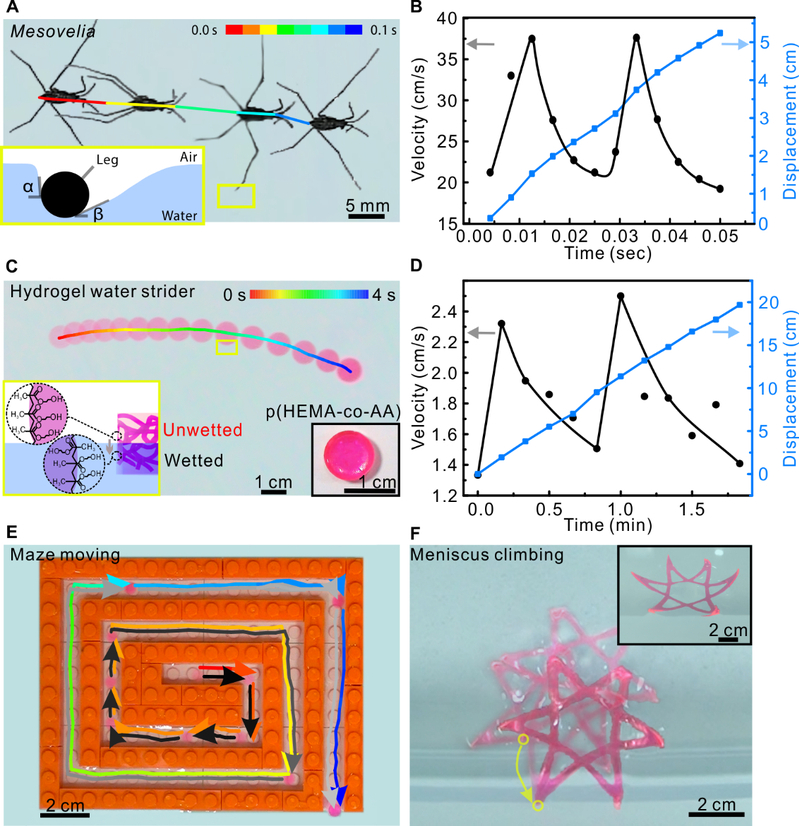
图1.水黾在水面运动的照片(A),运动机理示意图(图A左下角插图)和它运动速率和位移随时间的变化规律(B);活性水凝胶水黾在水面运动的照片和轨迹图(C),运动机理示意图(图C左下角插图)和它运动速率和位移随时间的变化规律(D);活性水凝胶水黾在有水的迷宫的水面自发找到出口的运动轨迹照片(E);刺激响应性活性水凝胶水黾在受到pH刺激变形后靠岸行为的运动轨迹照片(F)及靠岸后的侧视照片(图F右上角插图)。
Figure 1. (A) Superimposed time-lapse snapshots and corresponding color-indicated trajectory of the living water strider moving on water surface. The left inset is the schematic illustration of propulsion mechanisms. (B) The velocity and displacement of the insect locomotion. (C) Superimposed time-lapse snapshots and corresponding color-indicated trajectory of the hydrogel water strider moving on water surface. The left inset is the schematic illustration of the propulsion mechanism of the hydrogel water strider locomotion. The right inset is an enlarged photo of the hydrogel water strider. (D) The velocity and displacement of the hydrogel water strider locomotion. (E) The superimposed time-lapse snapshots and corresponding trajectory of hydrogel water strider moving in the maze solving motion. (F)The superimposed time-lapse snapshots of the hydrogel water strider climbing the meniscus and the trajectory of one tip of the pentagram-shaped hydrogel water strider.
研究团队探索发现其运动机理和自然界的水黾在水面的运动存在共通之处。如图1A和1C所示,都通过表面张力的差异驱动自身在水面运动;并且如图1B和1D所示,运动速率的变化规律也非常一致。通过设计活性水凝胶材料的形状、材料分布的非对称性和周边环境的表面亲疏水性,研究团队控制该活性水凝胶材料进行各种可控轨迹和定向的运动,例如模拟球类运动和走出迷宫运动(图1E)等。进一步,通过引入新的刺激响应性化学组分,活性水凝胶可以在自驱动运动期间同步实现变形,从而智能化地改变相应的运动轨迹;例如通过变形暴露不同润湿特性的侧边,实现类似于自然界水黾的爬岸动作。研究团队发明了一种可动态调节润湿特性的水凝胶材料,赋予其新的“活性”运动特征,展现了一种新颖的致动模式和运动行为。该工作为柔性软机器人的设计和研究提供了新的材料选择,丰富了水凝胶材料的种类,从而可为其在药物缓释、组织工程等重要领域的应用提供新的路径。
Hydrogels are a class of three-dimensional network-structured polymer smart materials with hydrophilic groups, which can rapidly swell in water and retain a large volume of water without dissolving in the swollen state. Due to the good biocompatibility and similarity of biological systems, hydrogels are widely used in daily life such as wound dressings and contact lenses, as well as cutting-edge researches such as tissue engineering and soft robotics. However, since hydrogels are rich in hydrophilic groups, they are inherently hydrophilic and generally not hydrophobic, so there are basically no pure hydrogel materials with hydrophobic characteristics.
On April 14, 2020, the research group of Prof. Yongfeng Mei of IIINN published a paper entitled Self-powered locomotion of a hydrogel water strider in Science Robotics. Doctoral student Hong Zhu is the first author and Yongfeng Mei is the corresponding author. This work is strongly supported by the shared instrument platform of the Department of Polymer Science of Fudan University and the State Key Laboratory of Molecular Engineering of Polymers. Starting from '0', the research team innovatively synthesized a new type of hydrogel smart material with dynamic wetting process. The hydrogel can self-propelled move on the water surface without without additional energy supply; the active hydrogel stops motion after saturated water absorption, and can be rejuvenated by drying treatment, realizing self-driven fast water surface motion again.
The research team explored and found that its movement mechanism has something in common with the movement of water striders in nature on the water surface. As shown in Figures 1A and 1C, they both drive themselves to move on the water surface through the difference in surface tension; and as shown in Figures 1B and 1D, the variation of the movement rate is also very consistent. By designing the shape of the active hydrogel material, the asymmetry of material distribution, and the surface hydrophilicity and hydrophobicity of the surrounding environment, the research team controlled the active hydrogel material to perform various controllable trajectories and directional movements, such as simulating ball motion and mazing solving motion (Figure 1E) and so on. Further, by introducing new stimuli-responsive chemical components, the active hydrogel can deform synchronously during self-driven motion, thereby intelligently changing the corresponding motion trajectory; Similar to the shore-climbing action of a water strider in nature. The research team invented a hydrogel material that can dynamically adjust the wetting properties, endow it with new active motion characteristics, and exhibit a novel actuation mode and motion behavior. This work provides a new material choice for the design and research of flexible soft robots, enriches the types of hydrogel materials, and thus provides a new path for its application in important fields such as drug release and tissue engineering.
文章信息:Hong Zhu, Borui Xu, Yang Wang, Xiaoxia Pan, Zehua Qu, Yongfeng Mei*. Self-powered locomotion of a hydrogel water strider, Science Robotics, 2021, 6: eabe7925.
文章链接:https://doi.org/10.1126/scirobotics.abe7925